OpenCV C++ getting started
Tuyen D. Le March 25, 2021 [Open-CV] #opencvInstall
Download
- Microsoft Visual C++ 2019 Community
- opencv_4.5.1
- opencv_3.4.13
Configure
https://acodary.wordpress.com/2018/07/24/opencv-cai-dat-opencv-visual-c-tren-windows/
- Project > Property
- Platform: x64
- Configuration Properties
- C/C++ > General: opencv\build\include
- Linker > General: opencv\build\x64\vc15\lib
- Linker > Input:
- For openCV_4.5.1:
opencv_world451d.libORopencv_world451.lib(d for debug) - For opencv_3.4.13:
opencv_world3413d.lib
- For openCV_4.5.1:
- Add
D:\tuyenld\dev\opencv_3.4.13\build\x64\vc15\bin(remember to correct your path) to PATH environment
Histogram equalization (HE)
- This is just a method, which may not give a flat full spectrum result.
- If the histogram of a problem is continuously changing, then the HE (automatic) method should be used. In other cases, a fixed histogram can be used and HE is not necessary.
Learning OpenCV 3 Computer Vision in C++ with the OpenCV Library (Adrian Kaehler and Gary Bradski)
https://github.com/oreillymedia/Learning-OpenCV-3_examples
Code
distanceTransform
- takes binary images as inputs.
- the gray level intensities of the points inside the foreground regions are changed to distance their respective distances from the closest 0 value (boundary)
Type
A Mapping of Type to Numbers in OpenCV
| C1 | C2 | C3 | C4 | Type | Bits | C++ type | Range | |
|---|---|---|---|---|---|---|---|---|
| CV_8U | 0 | 8 | 16 | 24 | Unsigned | 8bits | uchar | 0~255 |
| CV_8S | 1 | 9 | 17 | 25 | Signed | 8bits | char | -128~127 |
| CV_16U | 2 | 10 | 18 | 26 | Unsigned | 16bits | ushort | 0~65.535 |
| CV_16S | 3 | 11 | 19 | 27 | Signed | 16bits | short | -32.768~32.767 |
| CV_32S | 4 | 12 | 20 | 28 | Signed | 32bits | int | -2.147.483.648~2.147.483.647 |
| CV_32F | 5 | 13 | 21 | 29 | Float | 32bits | float | 0~1.0 |
| CV_64F | 6 | 14 | 22 | 30 | Double | 64bits | double |
// For example:
// has type: 0+((4-1) << 3) == 24
- 1 is the default number of channels (
CV_8U = CV_8UC1 = 0) - CV_32F defines the depth of each element of the matrix
- CV_32FC1 defines both the depth of each element and the number of channels.
Scalar
Template class for a 4-element vector derived from Vec.
Being derived from Vec<Tp, 4>
Scalar can be used just as typical 4-element vectors.
The type Scalar is widely used in OpenCV to pass pixel values.
cv::Scalar ;
cout << "Scala0: " << myWhite << "; Scala1: "
<< myWhite << "; Scala2: " << myWhite << endl;
// Scala0: 255; Scala1: 255; Scala2: 500
Differences of using “const cv::Mat &”, “cv::Mat &”, “cv::Mat” or “const cv::Mat” as function parameters?
https://stackoverflow.com/a/23486280
OpenCV handles all the memory automatically. First of all, std::vector, Mat, and other data structures used by the functions and methods have destructors that deallocate the underlying memory buffers when needed. This means that the destructors do not always deallocate the buffers as in case of Mat. They take into account possible data sharing. A destructor decrements the reference counter associated with the matrix data buffer. The buffer is deallocated if and only if the reference counter reaches zero, that is, when no other structures refer to the same buffer. Similarly, when a Mat instance is copied, no actual data is really copied. Instead, the reference counter is incremented to memorize that there is another owner of the same data. There is also the Mat::clone method that creates a full copy of the matrix data.
Linear vs non-linear filter
- In cases where the input data contains a large amount of noise but the magnitude is low, a linear low-pass filter may suffice.
- Conversely, if an image contains a low amount of noise but with relatively high magnitude, then a median filter may be more appropriate.
- In either case, the filter process changes the overall frequency content of the image.
But what is the Fourier Transform? A visual introduction
https://youtu.be/spUNpyF58BY
- Fourier Series > Periodic function of a continuous variable
- Fourier Transform > Not periodic function
CLAHE
- Contrast Limited Adaptative Histogram Equalization (CLAHE)
- clahe.c
- Contrast Limited Adaptive Histogram Equalization. Graphics Gems IV p482/579
Division of the image into 8x8 contextual regions usually gives good results; this implies 64 contextual regions of size 64x64 when AHE is performed on a 512x512 image
??
To avoid visibility of region boundaries, a bilinear interpolation scheme is used (see Fig.2)
Laplacian/Laplacian of Gaussian
-
https://homepages.inf.ed.ac.uk/rbf/HIPR2/log.htm
-
https://hcimage.com/help/Content/Quantitation/Measurements/Processing%20and%20Analysis/Enhance/Enhance%20Operations.htm
-
https://softwarebydefault.com/2013/05/11/image-edge-detection/
edge preserving filter in image processing opencv
Wavelet
http://www.nsl.hcmus.edu.vn/greenstone/collect/tiensifu/index/assoc/HASH01f6.dir/2.pdf Denoising: wavelet thresholding Ứng dụng phép biến đổi wavelet trong xử lý ảnh PTIT
Mean vs Median filter
The "mean" is the "average" you're used to, where you add up all the numbers and then divide by the number of numbers. The "median" is the "middle" value in the list of numbers.
- Median filter: suitable for grayscale image, don't use with binary image
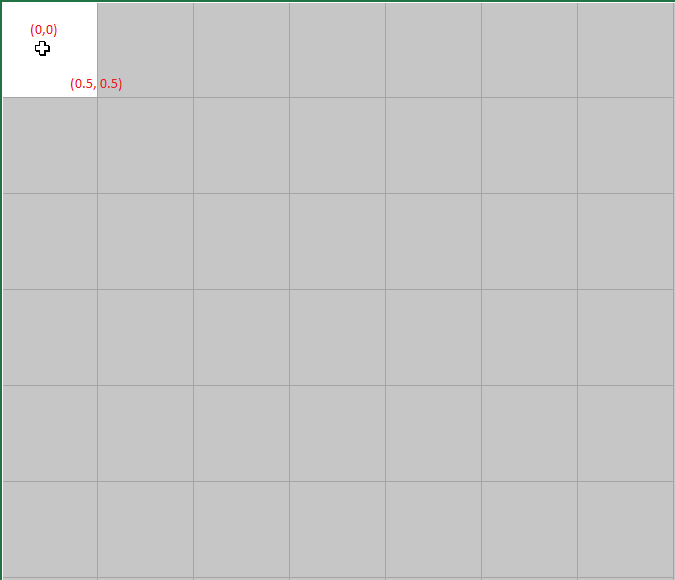
Point2f, sub-pixel coordinate origin
-
References:
-
Conclusion
- According to results above it seems that
cv2.remapuses coordinate system with pixel centers aligned to their integer indexes. top-left pixel centercoordinate is(0,0)- top left pixel spans from (-0.5,-0.5) to (+0.5,+0.5)
- whole image spans from (-0.5,-0.5) to (W-0.5, H-0.5)
- According to results above it seems that
Understanding and evaluating template matching methods
TM_SQDIFF_NORMED, TM_CCORR_NORMED, TM_CCOEFF_NORMED TM_SQDIFF, TM_CCORR, TM_CCOEFF
| TM_CCOEFF_NORMED | TM_CCORR_NORMED | TM_SQDIFF_NORMED |
|---|---|---|
| [-1, 1] (mean shifted) | [0, 1] | [0, 1] |
Understanding Moments function in opencv
Definition of moments in image processing is borrowed from physics. Assume that each pixel in image has weight that is equal to its intensity. Then the point you defined is centroid (a.k.a. center of mass) of image.
Assume that I(x,y) is the intensity of pixel (x,y) in image. Then m(i,j) is the sum for all possible x and y of: I(x,y) * (x^i) * (y^j).
And here you can read a wiki article about all kinds of image moments (raw moments, central moments, scale/rotation invariant moments and so on). It is pretty good one and I recommend reading it.
Adapting this to scalar (greyscale) image with pixel intensities I(x,y), raw image moments Mij are calculated by:
Centroid: ${\displaystyle {{\bar {x}},\ {\bar {y}}}=\left{{\frac {M_{10}}{M_{00}}},{\frac {M_{01}}{M_{00}}}\right}}{\displaystyle {{\bar {x}},\ {\bar {y}}}=\left{{\frac {M_{10}}{M_{00}}},{\frac {M_{01}}{M_{00}}}\right}}$
Clone all Fiji source code
# https://forum.image.sc/t/getting-the-source-code-for-fiji-without-using-maven/31964/6
findContours()
Reference:
Remember:
- In OpenCV, object to be found should be white and background should be black.
void double i = ;
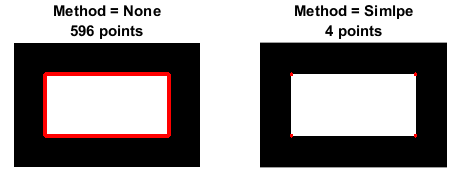
What is Contour Approximation Method?
CHAIN_APPROX_NONE vs CHAIN_APPROX_SIMPLE
What is Contours Hierarchy?
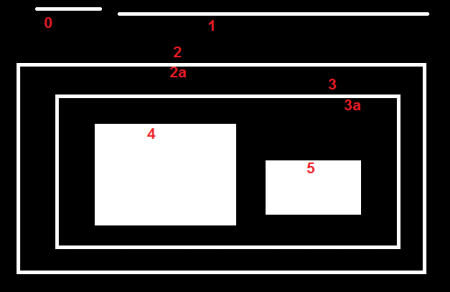
- Contour 0,1,2 are the same hierachy level
- child(2) = 2a; parent(2a) = 2
Watershed algorithm
Each pixel on the image was categozied as one of three type:
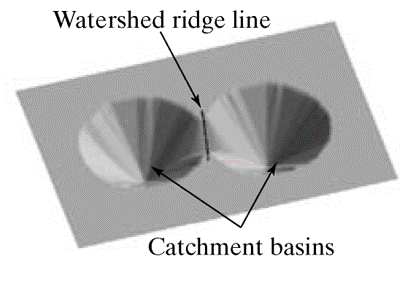
- regional minimum: the bottom of the cone.
- catchment basin: the region from the bottom of the cone to
watershed line - watershed lines: the border of
catchment basin
The algorithm will find these points.
How it works
- Find
regional minimum - From
regional minimum, pull the water intocatchment basin - Keeping to pull water into
catchment basinuntilcatchment basinoverlap. This iswatershed linespoint.